Выбор настроек ПИ-регулятора по методике Л.И. Кона
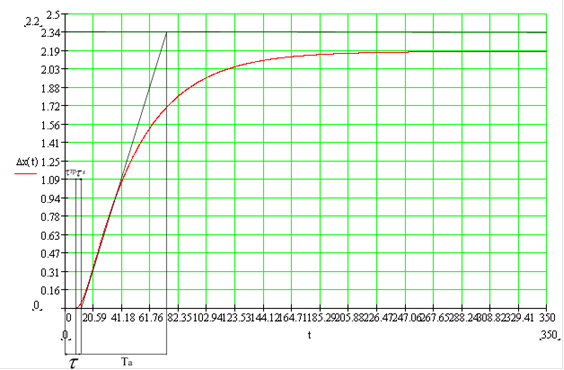
Рис. 10 Обработка кривой разгона Найдя точку перегиба, приравняв вторую производную к нулю и решив это уравнение и найдя уравнение касательной точки перегиба, мы нашли Ta=60 c, t=13 c и ts=t-tтр= 13-10 = 3 c. Найдём q и действительное время транспортного запаздывания t0.
Далее из таблицы определим, что: t0=t-0.105*Ta=13-0.105*60=6.7 c Действительное время емкостного запаздывания определяется по полному запаздыванию te=t-t0=13-6.7=6.3 c Из таблицы 2 для найденных q и te, зная g=3.509 найдём Т - постоянная времени инерционного звена - составной части модели объекта: T=g*te=3.509*6.7 = 23.5 Таким образом, объект управления заменяется (идентифицируется) моделью с передаточной функцией:
Найдя по таблицам Кона для заданных q=2,
|